Location
Evanston, IL, USA
地址
美国,伊利诺伊州
I am a Ph.D. student in Mechanical Engineering at Northwestern University, advised by Prof. Michael Rubenstein. My research focuses on full-stack novel robot design, minimalism in robotics, swarm robotics, and modular robotics. I am particularly interested in developing innovative robotic systems that challenge conventional design paradigms through creative hardware solutions and intelligent control algorithms.
Before starting my Ph.D., I obtained my Bachelor of Science in Physics from the School of Physics, Peking University in 2021, where I gained a solid physics foundation.
I am Gold Medalist in the 18th Asian Physics Olympiad (APhO) in 2017.
Download Resume: English Version | 中文版本
我是西北大学机械工程系在读博士研究生,师从Michael Rubenstein教授。我的研究涉及全栈新型机器人设计、极简机器人、集群机器人和模块化机器人。我的兴趣在于通过独特的硬件解决方案和控制算法开发来设计创新性的机器人系统。
我于2021年从北京大学物理学院获得物理学学士学位,拥有者扎实的物理学基础。
我是第18届亚洲物理奥林匹克竞赛(APhO)金牌得主。
简历: 中文版本 | English Version
Major Collaborator: Prof. Michael Rubenstein
This research demonstrates the first single motor drone swarm capable of autonomous flight using peer-to-peer (P2P) communication and sensing. Each drone, weighing only 20g and containing just one moving part, can fly independently with full control, featuring onboard P2P communication and precise positioning enabled by a novel infrared-based system. The drone is 10x lighter than all previous systems with comparable P2P positioning accuracy.
主要合作者: Michael Rubenstein教授
该研究开发了首个可自主飞行的单旋翼无人机群并实现了无人机间的相互通信与感知。每架单旋翼无人机仅重20克且仅有一个运动部件,具备自主可控飞行能力,并可依靠创新的红外系统实现高精度定位、通信、与环境感知。该无人机重量比现有的有类似点对点定位同类系统轻10倍。

Major Collaborator: Chen Yu, David Matthews, Prof. Sam Kriegman
This research introduces autonomous modular legs: agile yet minimal, single-degree-of-freedom jointed links that can learn complex dynamic behaviors and may be freely attached to form legged metamachines at the meter scale. This research enables rapid repair, redesign, and recombination of highly dynamic modular agents that move quickly and acrobatically through unstructured environments.
Paper | Webpage | Source Code
主要合作者: 余琛, David Matthews, Sam Kriegman教授
该研究提出了一种新型的模块化足式机器人。该机器人单个腿单元中仅包括一个电机及相应控制通信电路,结构极简但具备高动态表现。多个单元组合后可形成更复杂的高动态机器人以适应复杂地形并实现快速重构与自我修复。

Major Collaborator: Prof. Michael Rubenstein, Chen Yu
This research presents Rollbot, the first spherical robot that maneuvers on a 2D plane using only a single motor. By modulating motor speed and an attached mass, it controls trajectory curvature to follow circular paths and waypoints. Rollbot has simpler construction and lower cost comparing to conventional multi-motor spherical robots, and can also serve as a fail-safe for multi-motor spherical robots.
主要合作者: Michael Rubenstein教授, 余琛
该研究展示了Rollbot:首个仅使用单个电机在2D平面上机动的球形机器人。通过调制电机转速,它可以控其轨迹并实现可控运动。与传统的多电机球形机器人相比,Rollbot结构更简单、成本更低,还可以作为多电机球形机器人的失效备份。
Major Collaborator: Prof. Michael Rubenstein
Best paper finalist, best student paper finalist, best mechanisms and design paper finalist at IROS 2022
This work presents PCBot, a minimalist robot driven by a PCB-integrated bi-stable solenoid actuator. This actuator simplifies manufacturing and reduces assembly time to under 20 seconds. A prototype demonstrates precise motion on an orbital shake table. This research showcases the potential of minimalist, externally-driven designs in robotics.
主要合作者: Michael Rubenstein教授
IROS 2022最佳论文入围奖、最佳学生论文入围奖、最佳机构与设计论文入围奖
该工作提出了PCBot:一种由集成于PCB内的双稳态驱动器驱动的极简机器人。该设计极大地简化了制造过程,组装时间仅20秒。该研究展示了极简、外部驱动设计在机器人学中的应用潜力。
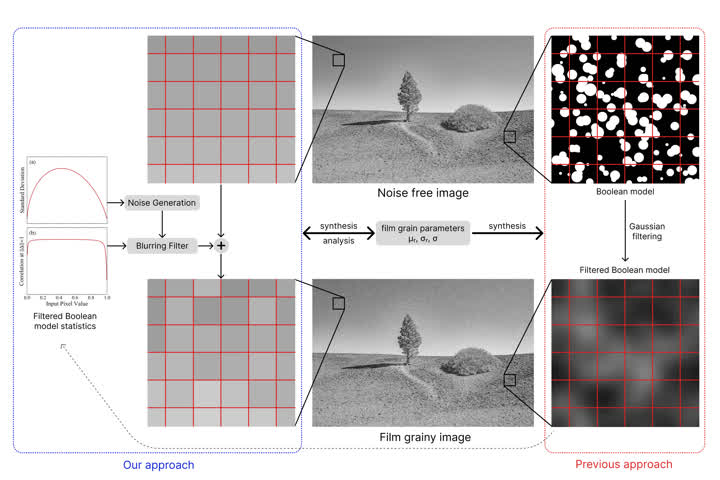
Major Collaborator: Dr. Kaixuan Zhang, Prof. Thrasyvoulos N. Pappas
主要合作者: 张凯旋博士, Thrasyvoulos N. Pappas教授
This research proposes a fast film grain rendering algorithm based on analytic statistics from a physics-based Boolean model used by Newson et al. Our method estimates model parameters from scanned images and enables real-time simulation when individual grains are not visible. Experiments show a six-order speed-up over Newson et al.’s Monte Carlo approach with strong visual fidelity. This work has potential applications in film production, computer graphics, and video compression.
该研究提出了一种快速胶片颗粒特效的渲染算法。我们的方法允许用户从扫描图像中估计模型参数,并实现实时的胶片效果模拟。实验显示我们的方法在比Newson等人提出的蒙特卡罗方法快六个数量级的同时保持了相同的视觉保真度。该工作在电影制作、计算机图形学和视频压缩中具有潜在应用。
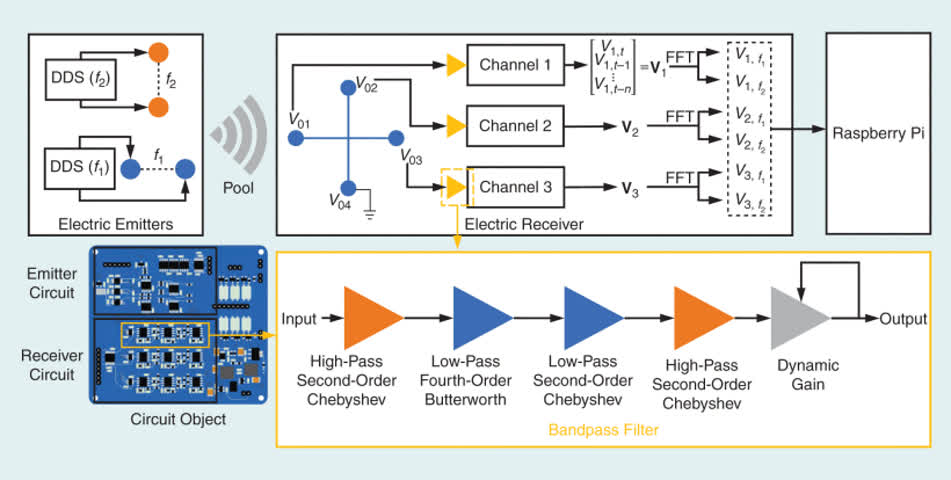
Major Collaborator: Dr. Junzheng Zheng, Xin Guo, Chayutpon Huntrakul, Prof. Chen Wang, Prof. Guangming Xie
This research presents a novel electric sense-based localization scheme for small free-swimming underwater robots in large-scale environments. Inspired by electric sensing in fish, the system uses distributed emitters and an onboard receiver to estimate position and orientation. Experiments demonstrate robust, accurate localization where vision and sonar struggle, offering a lightweight solution for constrained underwater robots.
Major Collaborator: Prof. Bin Chen
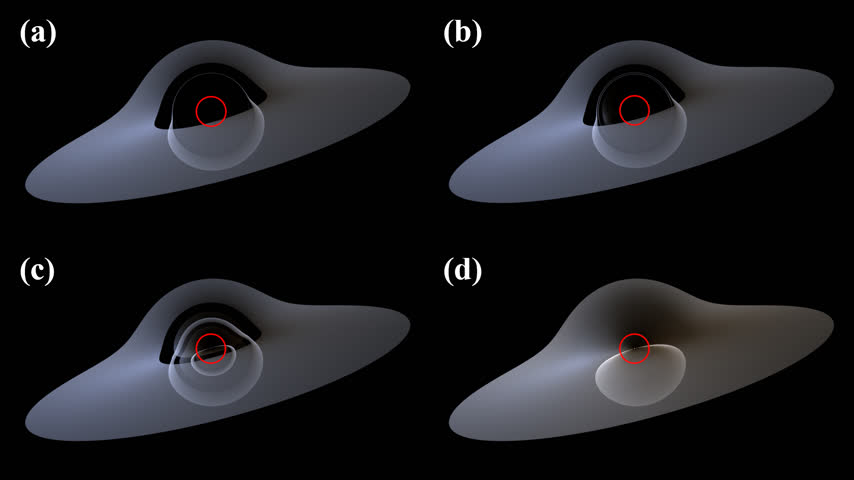
This paper introduces a double ray-tracing method for fast, physically accurate rendering of accretion disks near spherical spacetimes and used it to render the Schwarzschild black holes and JMN-1 naked singularities.
Major Collaborator: Dr. Shudeng Ma, Prof. Guangming Xie
This research explores light-actuated soft flying robots using liquid crystal polymer films driven by projected light. Although the method failed due to material softening under high light intensity, it revealed key insights into light-based actuation.
主要合作者: 马树灯博士, 谢广明教授
该研究探索了基于液晶聚合物薄膜制作光驱动软体飞行机器人的可能性。虽然最终由于液晶材料在高光强度下急剧软化现象而导致项目失败,但我仍认为这是一次有趣的尝试。
Major Collaborator: Qiuyuan Wang, Prof. Jing Yang
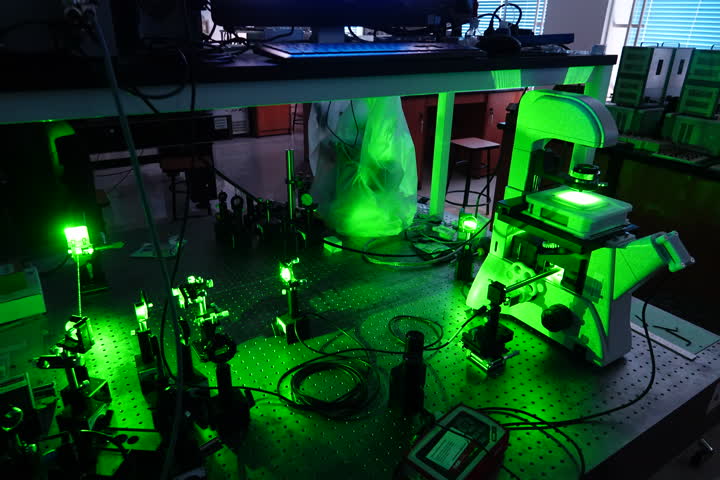
This work focuses on the construction of an optical tweezer with a trapping strength measurement system. We also investigated the possibility for phase-adjustable SPPs optical tweezer array.
Major Collaborator: Tianye Wang
This research proposes a distributed localization algorithm where robots estimate positions by exchanging virtual particles via sensor data only. It enables accurate, anchor-free localization and shape formation, validated in both simulation and real-world swarms.
Chen Yu*, David Matthews*, Jingxian Wang* (co-first author), Jing Gu, Douglas Blackiston, Michael Rubenstein, Sam Kriegman
arXiv preprint arXiv:2505.00784 (2025) (under-review at PNAS)
Jingxian Wang, Andrew G. Curtis, Mark Yim, Michael Rubenstein
Robotics: Science and Systems (RSS) (2024)
Jingxian Wang, Michael Rubenstein
arXiv preprint arXiv:2404.05120 (2024). (in prep)
Kaixuan Zhang*, Jingxian Wang* (co-first author), Daizong Tian, Thrasyvoulos N. Pappas
ACM Transactions on Graphics (ToG) 42, no. 4 (2023): 1-14.
Kaixuan Zhang*, Jingxian Wang* (co-first author), Daizong Tian, Thrasyvoulos N. Pappas
U.S. Patent Application 18/608,381, filed September 19, 2024.
Best paper finalist, best student paper finalist, best mechanisms and design paper finalist
Jingxian Wang, Michael Rubenstein
IROS 2022, pp. 1463-1470.
Junzheng Zheng, Jingxian Wang, Xin Guo, Chayutpon Huntrakul, Chen Wang, Guangming Xie
IEEE Robotics & Automation Magazine 29, no. 4 (2022): 50-65.
Jingxian Wang, Tianye Wang, Wei Wang, Xiwang Dong, Yandong Wang
arXiv preprint arXiv:2006.02658 (2020).
Jingxian Wang, Shuneng Ran, Kun Xun
Physics Experimentation 2018, no. 5 (2018): 8-12.
Advisor: Prof. Michael Rubenstein.
Research focus: full-stack novel robot design, minimalism in robotics, swarm robot, modular robot.
导师:Michael Rubenstein教授
研究方向:全栈新型机器人设计、极简机器人、集群机器人、模块化机器人
Major courses: Theoretical Mechanics, Electrodynamics, Quantum Mechanics, Thermal Physics, Optics, Computational Physics, Modern Physics Lab I and II, Theory of Elasticity, Computational Fluid Mechanics, etc.
主要课程:理论力学、电动力学、量子力学、热学、光学、计算物理、近代物理实验 I & II、 电子线路与实验、弹性力学、计算流体力学等
Best Paper Finalist
Best Student Paper Finalist
Best Mechanisms and Design Paper Finalist
最佳论文奖入围
最佳学生论文奖入围
最佳机构与设计论文奖入围
Peking University, 2021
北京大学,2021
Awarded for "Light-actuated soft flying robot"
School of Engineering, Peking University, 2021
获奖项目:"光驱动软体飞行机器人"
北京大学工学院,2021
Peking University, 2020
北京大学,2020
Peking University, 2019
北京大学,2019
Peking University, 2018
北京大学,2018
6th place out of 201 students
Peking University, 2018
全年级第6
北京大学,2018
Second Prize
Peking University, 2017
北京大学,2017
18th Asian Physics Olympiad (APhO), 2017
第18届亚洲物理奥林匹克竞赛(APhO),2017
Specialty: Architecting and analyzing novel robot systems, rapid prototyping of hardware and algorithms, multi-paradigm data processing.
Advantages: Extensive experience in novel system design and software-hardware joint development, exposure to latest ideas in robotics, solid background in physics.
Technical Skills:
English Proficiency: TOEFL iBT 114 (out of 120), GRE 327 (out of 340).
专业特长:新型机器人系统的架构与分析、硬件与算法的快速原型设计、多范式数据处理。
优势:在新型系统设计和软硬件联合开发方面有丰富经验,熟知机器人学前沿理念,具有扎实的物理学背景。
技术技能:
英语水平:托福iBT 114分(满分120分),GRE 327分(满分340分)。